
固緯電子電力電子教學(xué)小課堂 | 第三十講: PEK-190模塊——PMSM矢量控制
PTS-系列之PEK-190系列教學(xué)
PEK-190模塊 ——PMSM矢量控制
寫在前面的話
永磁同步電機(jī)(Permanent Magnet Synchronous Motor——PMSM)是用稀土永磁體取代勵(lì)磁繞組所構(gòu)成的一種新型同步電機(jī)。其結(jié)構(gòu)簡單、體積小、運(yùn)行可靠,相對于感應(yīng)電機(jī),PMSM 效率高、功率密度大、調(diào)速范圍寬、力矩波動(dòng)小、能夠運(yùn)用在高壓大容量伺服驅(qū)動(dòng)的場合。
固緯PEK-190模塊是適配額定功率400W,額定轉(zhuǎn)速3000rpm的PMSM可滿足教學(xué)需求。本期基于PEK-190模塊的矢量控制策略教學(xué)為老師提供PMSM相關(guān)控制策略資料以及教學(xué)資源。
PEK-190
電機(jī)控制模組
PEK-190模組介紹:
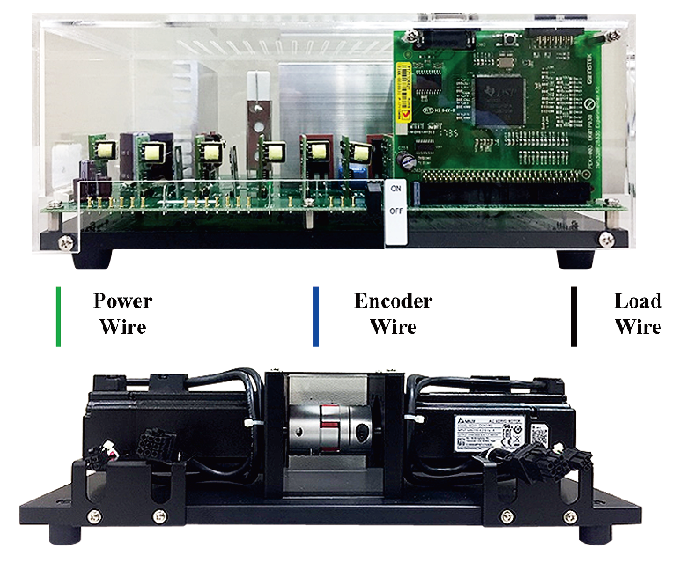
PEK-190 為PMSM驅(qū)動(dòng)模組(Motor Drive),模組實(shí)物照片如圖1 所示,主要為三相全橋逆變器(Single Phase Inverter)與PMSM組成,同時(shí)還具有主要變量的檢測和DSP控制功能部分。該模組實(shí)驗(yàn)?zāi)康氖菫槭褂谜咛峁┗贒SP控制的電力變換器學(xué)習(xí)平臺(tái),即借助 PSIM 軟件完成仿真和實(shí)驗(yàn)。第一學(xué)習(xí)者可以在PSIM上建立模擬(連續(xù))仿真電路,以學(xué)習(xí)電力變換器的原理、分析和功能設(shè)計(jì);第二將電力變換器的控制器(如PI 控制器)離散化,即轉(zhuǎn)化去數(shù)字(離散)仿真部分,進(jìn)行仿真研學(xué);第三借助DSP芯片內(nèi)部所具有的A/D轉(zhuǎn)化器、數(shù)據(jù)處理和PWM信號(hào)生成功能,再次進(jìn)行數(shù)字(離散)仿真;第四通過PSIM 之 C代碼生成功能,將控制部分生成C代碼;最后將生成的C代碼下載于PEK-190的DSP之中,以備實(shí)物實(shí)驗(yàn)。這樣設(shè)計(jì)的最大優(yōu)點(diǎn)方便實(shí)驗(yàn)者能夠快速完成DSP對變換器主電路的控制。
進(jìn)行實(shí)驗(yàn)除需要PEK-190 模組外,仍需配置PEK-005A(輔助電源)和 PEK-006 (JTAG 下載器)等,并在 PTS-3000的實(shí)驗(yàn)平臺(tái)上完成。

PTS-3000 實(shí)驗(yàn)平臺(tái)
Motor Drive組成:
PMSM驅(qū)動(dòng)實(shí)驗(yàn)系統(tǒng)組成如圖所示,即主要由DC電源、三相逆變電路、Motor、檢測單元模塊和DSP數(shù)據(jù)采集、處理及PWM信號(hào)模塊組成。
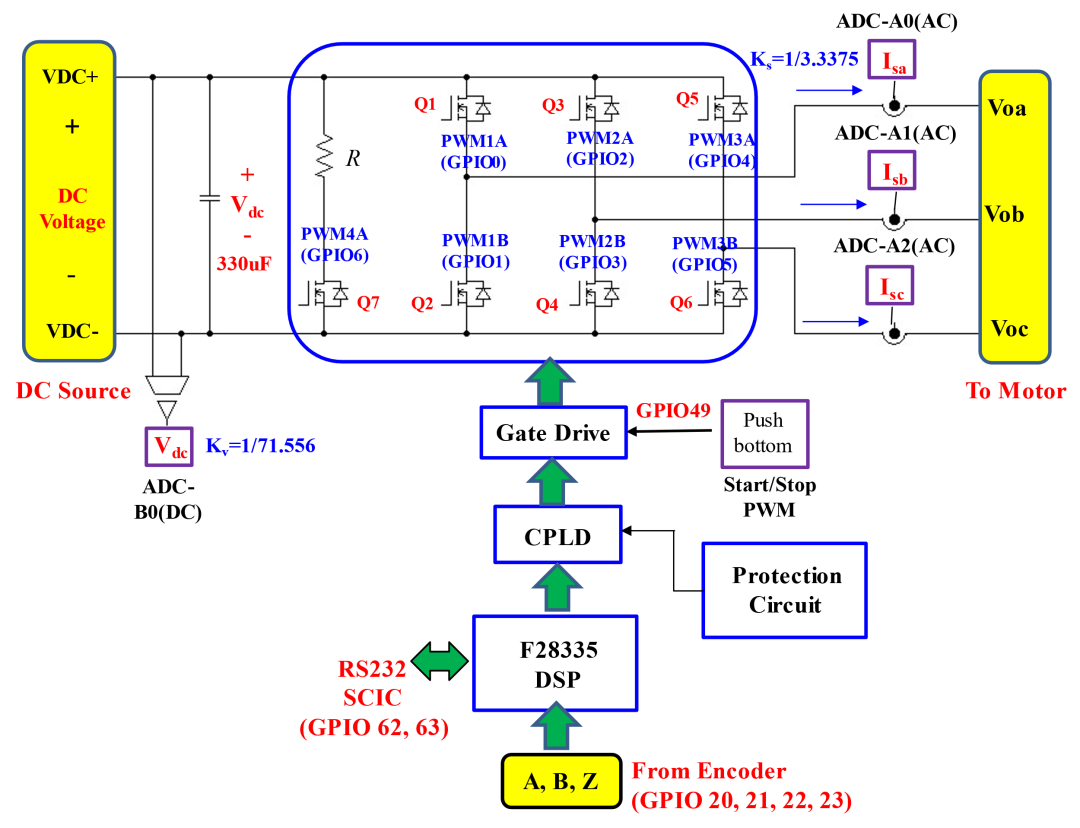
PMSM驅(qū)動(dòng)實(shí)驗(yàn)系統(tǒng)
PMSM實(shí)驗(yàn)方案:
一個(gè)完整的電機(jī)驅(qū)動(dòng)實(shí)驗(yàn)需要以下步驟部分,即(1)電機(jī)數(shù)學(xué)物理模型分析與建立;(2)電機(jī)矢量控制策略;(3)仿真驗(yàn)證。下面對實(shí)現(xiàn)PMSM矢量控制實(shí)驗(yàn)的主要步驟及操作平臺(tái)進(jìn)行討論。
(1)電機(jī)數(shù)學(xué)物理模型分析與建立
PMSM 的研究早在1930 年已經(jīng)開始,隨著電磁材料技術(shù)、計(jì)算機(jī)輔助設(shè)計(jì)技術(shù)、控制技術(shù)、驅(qū)動(dòng)電路技術(shù)等基礎(chǔ)技術(shù)的發(fā)展,PMSM 特性得以很快的發(fā)展。PMSM 的控制技術(shù)于1971 年得到了突破性的進(jìn)展。德國西門子公司的Blaschke 等人首先提出了交流電機(jī)的矢量控制理論,后來這一理論在PMSM 領(lǐng)域得到了快速的發(fā)展。
(固緯實(shí)驗(yàn)?zāi)=M)PMSM結(jié)構(gòu)模型和等效坐標(biāo)如圖所示。
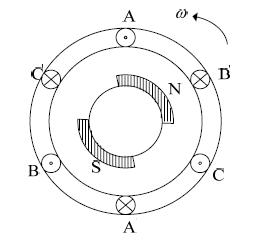
PMSM 結(jié)構(gòu)模型
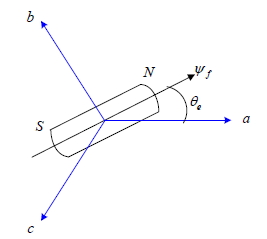
PMSM 的等效結(jié)構(gòu)坐標(biāo)圖
電機(jī)定子一般由三相繞組和鐵心組成,其中三相繞組往往以星型的方式連接,其物理方程如下:
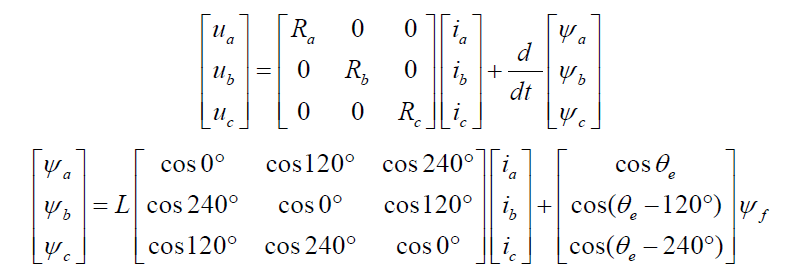
ua、ub 、uc 為三相定子繞組電壓;
Ra 、Rb 、Rc 為三相定子繞組電阻,大小均為R ;
ia 、ib 、ic 為三相定子繞組電流;
ψa ,ψb,ψc 為三相定子繞組的磁鏈;
L為三相定子繞組的自感,包括漏電感分量和主電感分量;
ψf 為轉(zhuǎn)子永磁磁鏈;
θe 為轉(zhuǎn)子軸線與A 相繞組軸線夾角的電氣角度。
在永磁同步電機(jī)數(shù)學(xué)模型研究中,經(jīng)常用到如圖5~7所示三個(gè)坐標(biāo)系,它們是靜止的abc 坐標(biāo)系、靜止的αβ 坐標(biāo)系和旋轉(zhuǎn)的dq 坐標(biāo)系。坐標(biāo)系之間可以進(jìn)行相互變換,如abc坐標(biāo)系到αβ 坐標(biāo)系的坐標(biāo)系變換稱之為Clark 變換,αβ 坐標(biāo)系到dq 坐標(biāo)系的變化則是Park 變換。
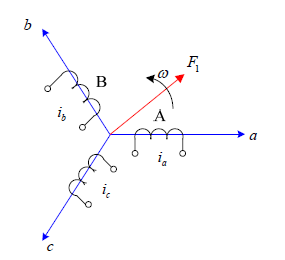
abc坐標(biāo)系
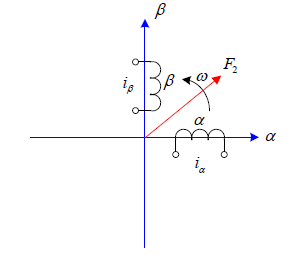
αβ坐標(biāo)系
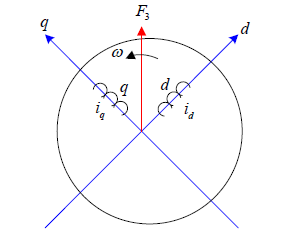
dq坐標(biāo)系
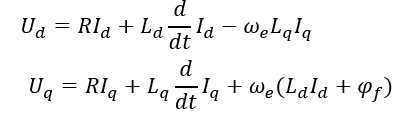
三相交流繞組電路,假設(shè)繞組A、B、C通以時(shí)間上相差120、角速率為ω 的三相對稱正弦電流。那么三相電流將產(chǎn)生合成的磁動(dòng)勢 F1 ,它在空間成正弦分布,與交流電同頻順著A? B ?C相序來旋轉(zhuǎn);兩相繞組α 和β ,它們在空間上相差90。當(dāng)通以時(shí)間上相差90、角速率為ω 的兩相平衡正弦電流時(shí),也能產(chǎn)生空間上為圓形、角速度為ω 、磁動(dòng)勢為 F2 的旋轉(zhuǎn)磁場;在旋轉(zhuǎn)坐標(biāo)系dq 中,如果在匝數(shù)相等且互相垂直的繞組d 和繞組q 中分別通以直流電流。兩相直流電流能夠產(chǎn)生合成的磁動(dòng)勢F3 。由于兩個(gè)繞組以同步角速度ω 一起旋轉(zhuǎn),則磁動(dòng)勢F3 也會(huì)隨之成為旋轉(zhuǎn)磁動(dòng)勢。經(jīng)過坐標(biāo)變換之后,即可獲得系統(tǒng)的微分方程如下所示:
(2)電機(jī)矢量控制策略
考慮到一般的PMSM 伺服系統(tǒng)的功率不大,但對于過載能力以及轉(zhuǎn)矩響應(yīng)特性有比較高的要求。并且id = 0 控制方法比較簡單,電機(jī)的輸出轉(zhuǎn)矩與定子電流的幅值成線性關(guān)系,且無去磁效應(yīng)。因此,采用如圖所示的PMSM矢量控制策略。
id = 0 的控制方案要求,在電機(jī)運(yùn)行過程中,系統(tǒng)通過不斷檢測電機(jī)轉(zhuǎn)子角位置,進(jìn)而改變定子合成電流矢量is 的大小和方向,使is 的直軸分量滿足id = 0,交軸分量iq = is。(這樣一來,電機(jī)定子電流所形成的電樞磁場將一直與電機(jī)轉(zhuǎn)子軸垂直,實(shí)際交軸電流也與設(shè)定的定子合成電流值相等,)即所有的電流都用來使電機(jī)輸出電磁轉(zhuǎn)矩,逆變器也無需為電機(jī)提供無功勵(lì)磁電流。此種方案下電磁轉(zhuǎn)矩輸出平穩(wěn)、響應(yīng)迅速,因此電機(jī)能夠很好的啟動(dòng)與制動(dòng),調(diào)速性能較好,調(diào)速范圍也寬。
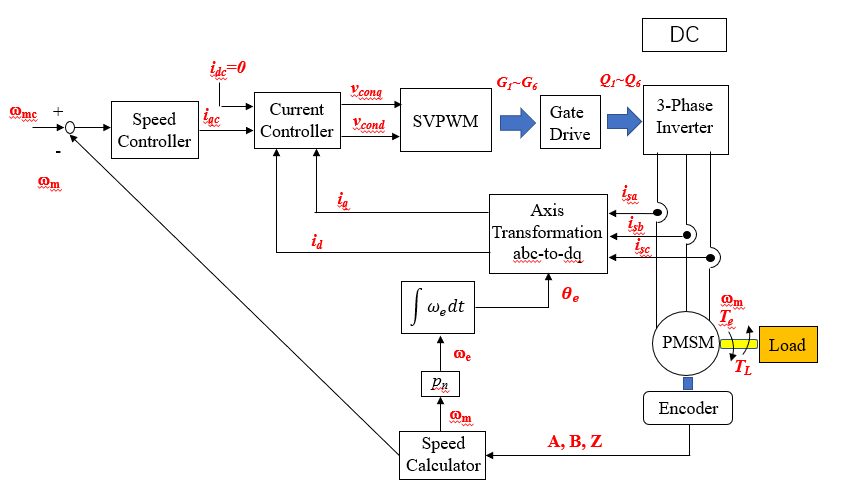
伺服系統(tǒng)屬于串級(jí)控制系統(tǒng),由速度環(huán)和電流環(huán)組成。速度環(huán)的作用是使電機(jī)的轉(zhuǎn)速跟蹤設(shè)定轉(zhuǎn)速,能夠控制電機(jī)加減速,增強(qiáng)系統(tǒng)抗負(fù)載擾動(dòng)的能力,抑制速率波動(dòng)。電流環(huán)的作用是根據(jù)速度環(huán)給定的力矩電流值和檢測的電機(jī)相電流值,使控制器產(chǎn)生實(shí)時(shí)的空間矢量PWM 波形(的控制電壓信號(hào)),進(jìn)而通過逆變器來改變電機(jī)相電流值。
(3)仿真驗(yàn)證
在PSIM軟件中結(jié)合以上分析搭建如圖所示可生成代碼的數(shù)字仿真電路,其仿真與實(shí)驗(yàn)結(jié)果如圖所示。
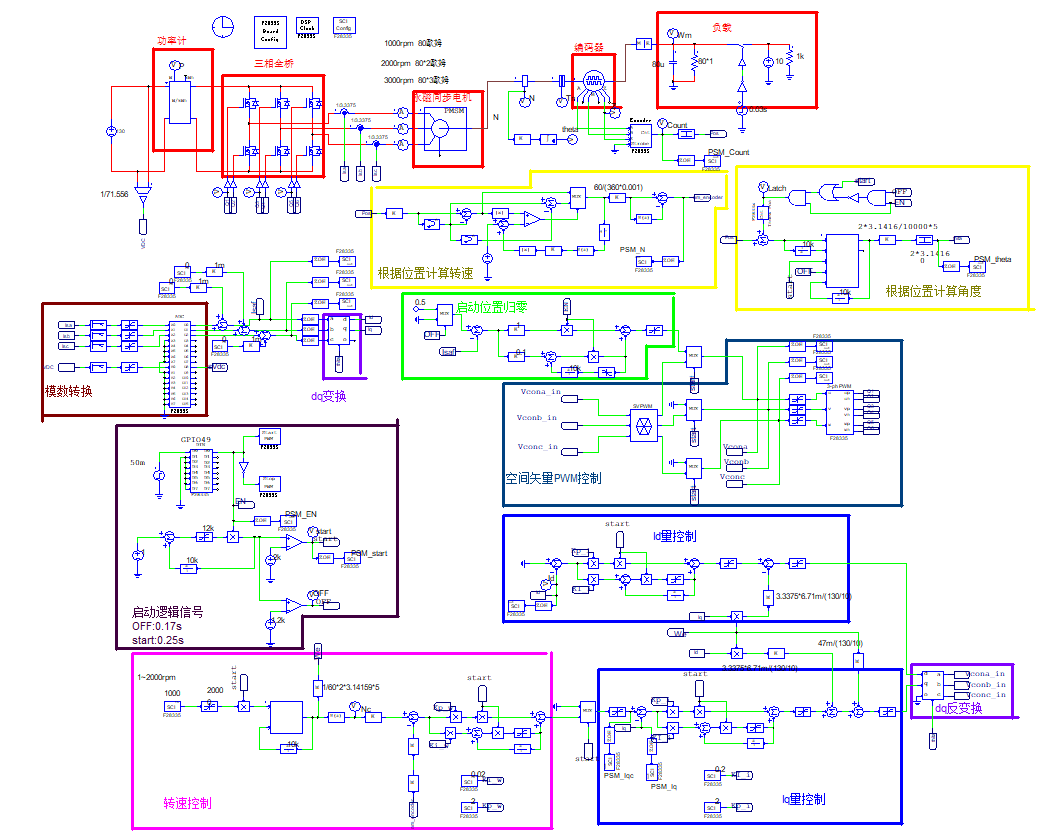
PMSM矢量控制電路
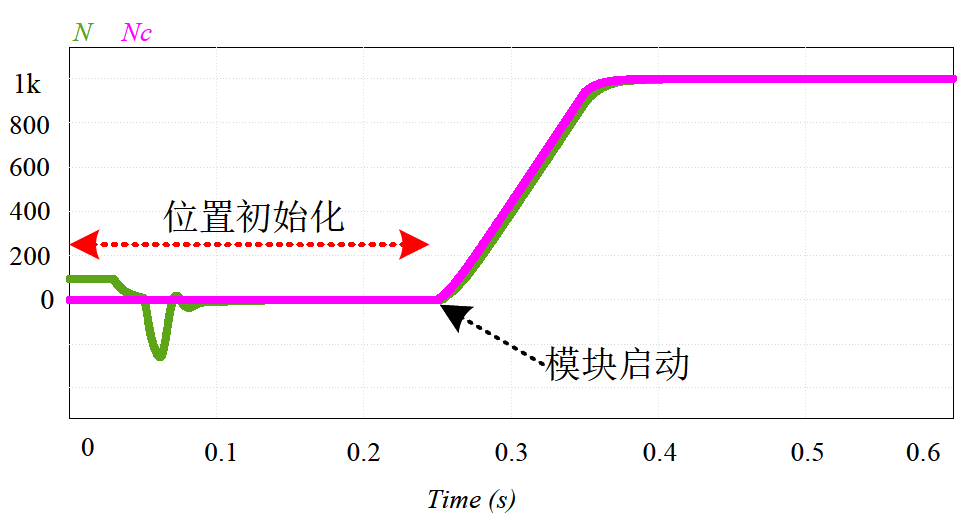
電機(jī)轉(zhuǎn)速與給定
結(jié) 論:
當(dāng)模塊在啟動(dòng)前,系統(tǒng)進(jìn)行了一次轉(zhuǎn)子初始位置檢測以防止電機(jī)反轉(zhuǎn)。在0.25S時(shí)系統(tǒng)給定轉(zhuǎn)速為1000rpm,電機(jī)能夠跟隨給定進(jìn)行正常工作,說明基于矢量控制的PMSM實(shí)驗(yàn)完成。